
How the Central Nervous System Controls Movement for the Golf Swing
This article probably only of interest to those interested in understanding the science!
[Please scroll to the bottom for definitions of important keywords]
Having come to motor control last of all in my seeking of knowledge about the ‘great triumvirate’ that make up the movement sciences – biomechanics, anatomy and motor behavior (covering both learning and control), I have become increasingly more fascinated by the latter.
To me, motor control is very close to the concept of “Man proposes and God disposes” – despite whatever a golfer might plan to do, the human brain and spinal cord (CNS) that are responsible for the command and execution of a movement, might ‘have other ideas’!
Additionally, the subject is so fascinating because it is the most elusive of all concepts within the field of kinesiology to grasp, simply because so little is known about the control of movement.
This post is designed to describe many motor control concepts in less jargon-y terms than the field is notorious for, and to explain how motor control concepts might be applied to golf. It is also intended to question motor control theories as regards to their suitability for explaining some of the more idiosyncratic movements that afflict most golfers.
Common motor control theories (in simpler terms)
The ’problem’ motor control experts have long considered is how the body and, specifically its muscles and joints, all move together in a coordinated manner to carry out a specific movement, such as, for example, a golf swing.
How should the many joints involved in a movement be moved, in a specific order (think golf downswing), at what speed, and with how much force are all important aspects of a specific movement that motor control experts have sought to understand.
The Generalized Motor Program (GMP – first considered in 1975) proposed the idea that a movement plan is stored in the brain’s memory and it contains all the commands required to carry out a particular action.
The GMP was a popular theory for a long time but was unable to explain many important questions. How can so much information for the multitude of different actions humans perform all be stored? How might a human perform a novel action? How can movements be modified over time? How does the environment in which it is performed affect a movement? How does the body’s initial position influences movement? Where does variety come from?
The GMP theory has been modified over time and proponents agree that feedback from a movement will allow for a better plan to evolve over time, with practice and experience. Some GMP experts even concede that the movement program can be ‘parameterized’ or altered based on the environment and the current state of the person performing the movement.
A modified concept has been put forth in recent decades – The Dynamical Systems Theory (DST). DST too believes in some hierarchy and that a response must be selected by the central nervous system (brain and spinal cord). However, it departs from basic GMP ideology because it believes that a movement is capable of ‘self-organization’. Thus, a ‘system’ such as the human body and its joints and muscles can adjust a movement dynamically, or as it is being organized, to suit prevailing conditions.
Dynamical or self-organizing systems are seen everywhere in nature and help to explain how a storm system forms or how birds such as starlings flock together or a school of fish swim in complete synchrony.
In such a system, when used to describe human movement, there is no hierarchical or top-down (from the ‘controller’ i.e. the brain downwards) control of the movement as explained by the GMP. Rather, multiple systems (muscular, skeletal, neurological and biological) work together to create a movement such as a golf swing, within the ‘constraints’ of a particular situation.
There are three basic ‘constraints’. They are:
1) the organism performing the movement (in our case the golfer)
2) the environment within which the movement is performed (such as wind or the slope on
which the ball lies)
3) the task (for instance full-swing, partial swing, intentional slice).
An important concept within the DST is a ‘synergy’. It refers to the organization of a specific task by sharing the job among the related components involved, in order to help stabilize performance. Mostly ‘synergy’ is thought of as muscle synergy or the organization of a group of muscles that together produce motion at relevant joints.
The DST is said (see an interesting video on DST: https://www.youtube.com/watch?v=2vvfNEbhscM) to involve a more mechanical understanding of movement control (including the involvement of forces, speeds, and other external factors) than a merely biological one (nervous-system-specific).
What specific strategies can a system use to develop suitable synergies? In other words how does the human body actually go about getting groups of muscles to act together to say, for instance, move an arm in tennis or the golf club in golf?
One such strategy has been referred to as the ‘leading joint hypothesis’ (LJH). It was developed by Natalia Dounskaia, until recently a professor at Arizona State University. Her 2010 paper ‘Control of Human Limb Movements: The Leading Joint Hypothesis and Its Practical Applications’ is well worth the read (https://www.ncbi.nlm.nih.gov/pmc/articles/PMC2965031/). Her more-recent paper (July 2023) on the subject is titled ‘The Strategy of Human Movement Control and Teaching Motor Skills in Norm and Pathology’. It is perhaps an even more useful one for golfers and golf instructors alike.
Dounskaia has said that, “The strategy used by the brain to organize human goal-directed movements is still debated.” [A goal-directed movement being one such as the golf swing where a club must strike a golf ball]. Additionally, she has said, “The LJH is based on the idea that the CNS exploits the biomechanical properties of the limbs for movement organization.”
According to Dounskaia, unless there is a clear understanding of the strategy by which movement is organized, the teaching of the movement would remain merely an art-form and not be adequately scientific.
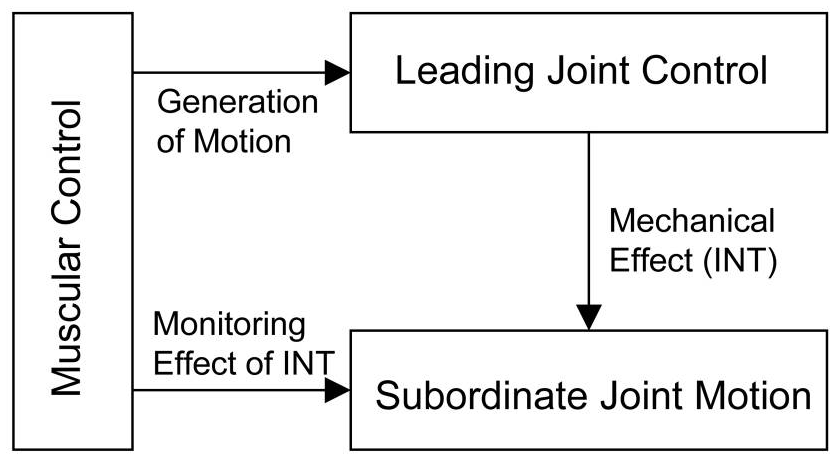
What, then, is the LJH? It states that a single or ‘leading’ joint is rotated ‘actively’ (using muscle force). The biomechanical effects of that motion then become the main contributor to the movement of the ‘trailing’ joints. One such biomechanical effect is ‘joint interaction torque’, which is a passive torque not caused by muscle action.
The role of the leading joint is given to the joint with the largest mechanical advantage, both because of its greater inertia and greater musculature. This joint must therefore be the most ‘proximal’ one.
In the case of large complex movements such as golf, the lead joint would be the trunk, with the desired movement being similar to that of a whip. A single wave of the whip handle (trunk) would create a complex motion of the whip’s cord (arms, in the case of the golf swing).
In more practical terms, the leading joint is required to provide adequate speed and range of motion for the task of the trailing joints. The leading joint should thus be able to suppress the passive influence of the distal segments. Also, the trailing joints have to ‘regulate’ the interaction torque in order to provide appropriate hand path and accuracy.
The LJH matches well with the now-well-accepted concept of the proximal-to-distal kinematic sequence seen in striking and throwing sports including the golf swing. The proximal ‘joint’ or the trunk would be the ‘lead’ joint and all other motion (of the arms and club) would devolve to the interaction of the trunk with the arms.
Thus, according to Dounskaia, the LJH is a strategy that it would be easy to verbalize and, more importantly, would make for a simple pattern even amongst seemingly complex movements such as the golf swing. Additionally, the strategy would require far less neural control by the brain. It would also reduce the learning of the movement to just one or two movement elements at a time, such as the focus on the ‘leading’ joint.
POINTS TO PONDER:
Given that the trunk is the leading joint, and a proximal-to-distal sequence is already widely accepted in golf, questions that arise are:
- Does the trunk/torso have to move ‘open’ as the pelvis and shoulder do in a typical downswing? Or might the movement be equally efficient from closed to square, as the club moves close to the region of club-ball contact?
- How much does the trunk actually need to move? Dr. Stuart McGill, world-famous biomechanist, found from over 15 years of research on golfers that there is just a small pulse of muscle activity from the trail (right-side for right-handed golfers) gluteus maximus and trail external oblique (both strong core muscles) just before, and at, impact respectively. Also, he is a great proponent of proximal stiffness for distal speed! Additionally, the force-velocity curve for muscles tells us that the faster you go (i.e. move the body and arms) the less force (within the muscle) you have time to produce. All three pieces of information might lead to the conclusion that the trunk’s rotation need only be a brief yet forceful movement, late in the downswing, after the arms have first dropped down.
- Do the legs (including the hip, knee and ankle joints) have any role in an LJH or a kinematic sequence?
- How might the arms have the greatest amount of interaction torque (which is said to increase with the speed of the movement)? By creating maximum length of arms’ movement as well as maximum distance between the arms and the trunk? This would surely permit a greater amount of distance within which to generate greater speed (speed = distance/time).
MORE POINTS TO PONDER
The LJH does not account for the ‘attractor’ states that are an integral part of the Dynamical Systems Theory.
A very simple definition of an attractor state is rephrased here from a paper titled ‘The Influence of Attractor Stability of Intrinsic Coordination Patterns on the Adaptation to New Constraints’, published 2020, by Yamamoto et al. (original definition in the keywords below):
A specific movement to which the golfer’s body is naturally ‘drawn’ and gets back into, after a disturbance (such as a swing change).
Examples of attractor states that are very stable and a golfer might easily return to after a perturbation include ‘over the top’ or ‘early extension’.
Questions:
- Might there be positions at the top of the backswing that ‘constrain’ the body into an over-the-top or an early-extension movement in the downswing?
- If yes, what might those positions be?
- If a golfer is likely to return to an attractor state even after working on a swing change how can they improve?
Please do use the contact form to email me more questions.
I also have the answers to many of the above questions from years of empirical research of these very questions!
Keywords:
Motor = something that produces or refers to motion (i.e. of muscles moving joints)
Nervous System = includes the brain, spinal cord and all the nerves of the body
Central Nervous System (CNS) = brain and spinal cord only
Motor Behavior = the learning, control and development of motor skills (combines motor learning and motor control)
Motor Control = the process of initiating, directing, and grading purposeful voluntary movement
Attractor state or attractor = An attractor is a region into which a specific trajectory or a fixed point is naturally drawn, converges, and settles down, that does not collapse when a disturbance occurs, and that can converge to the original trajectory or point.